
MindChip OÜ carried out an innovation project aimed at protecting its proprietary Self-Adaptive Autonomous Control System (SAAC) through a formal patent application...
Mindchip is proud to announce its participation in the groundbreaking CERTIFAI project, an EU-funded initiative focused on revolutionizing cybersecurity practices for ICT products, processes, and...

From February 1 to October 31, 2023, Mindchip completed the Artificial Captain algorithms and sensor fusion development project, aimed at creating and testing intelligent navigation algorithms for use...

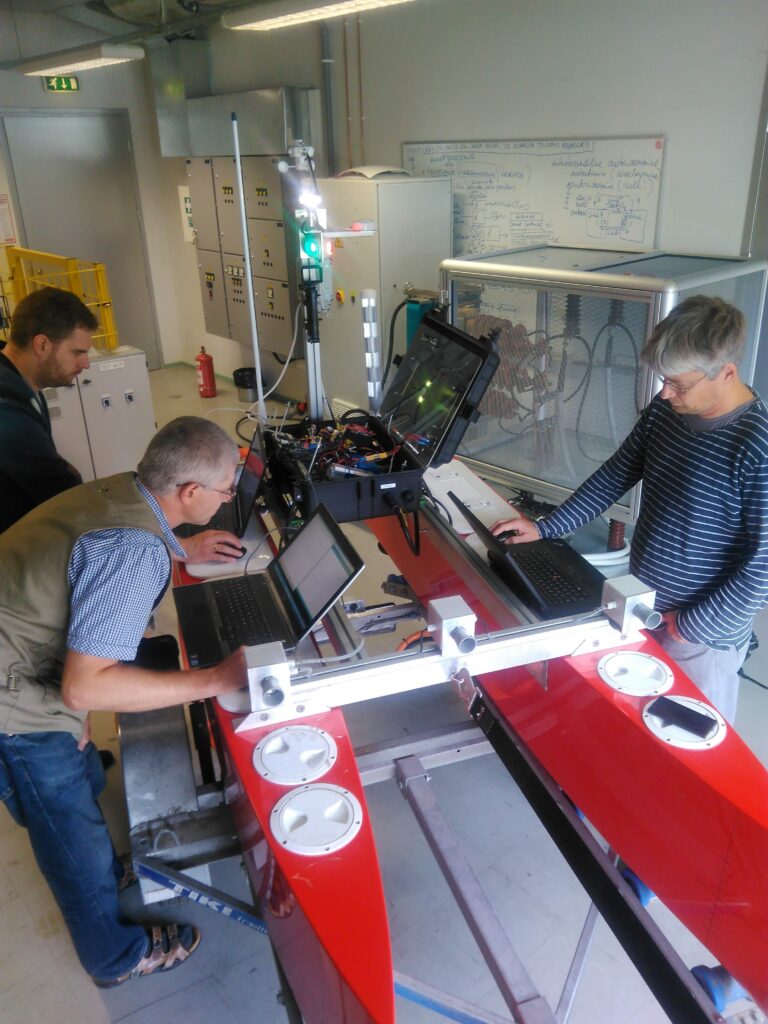
Mindchip provided its Artificial Captain system to an autonomous research vessel developed within the RIMA project, which ran from October 1, 2020, to June 30, 2023. The vessel is used for commercial...
Developing technology for pre-programmed autonomous open-water testing of full-size vessels was the focus of a university–business cooperation project that ran from 2021 to 2023...
The project was funded by the European Union’s Horizon 2020 research and innovation programme under the RIMA framework and ran from 2021 to 2022...
- 1
- 2